193-0801-9605

立即咨询

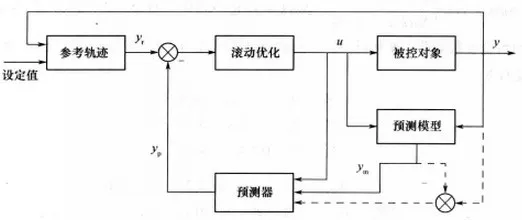
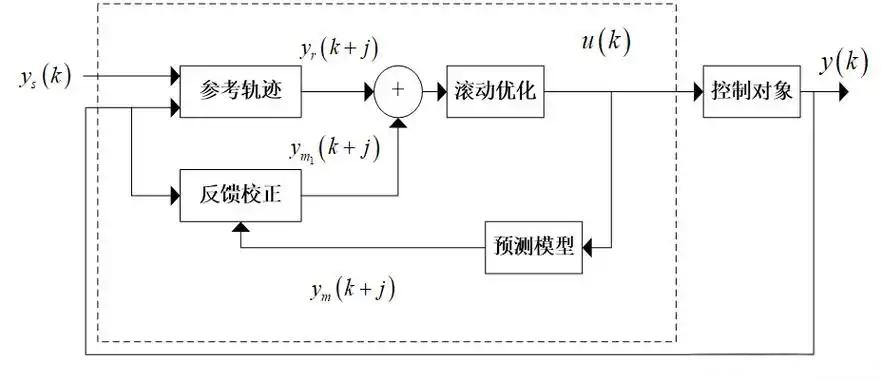
introduction 现代复杂工程系统的CAE仿真中,如何实现仿真过程的实时响应和多目标最优控制是较为关键的问题。模型预测控制(MPC)作为一种前馈控制技术,通过预测未来系统状态并优化控制序列,为仿真系统提供了精准调节手段。 随着强化学习与人工智能的发展,MPC不断融合多种智能技术,从经典控制理论迈向更灵活、更高效的智能预测控制模式。本文系统梳理了多种MPC变体及其在CAE仿真中的典型应用场景。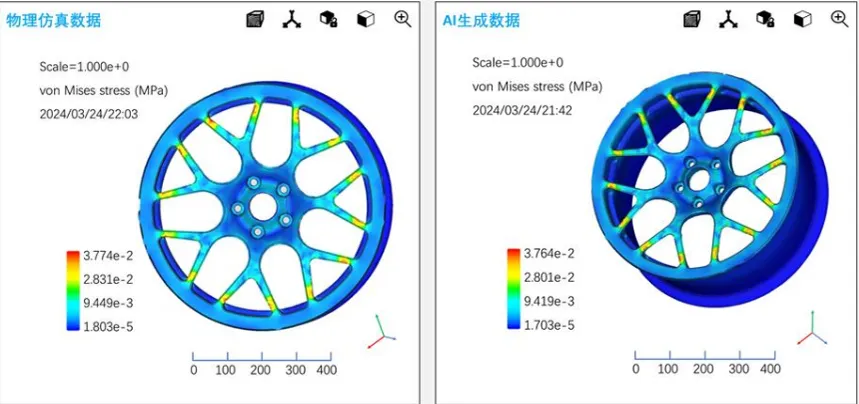
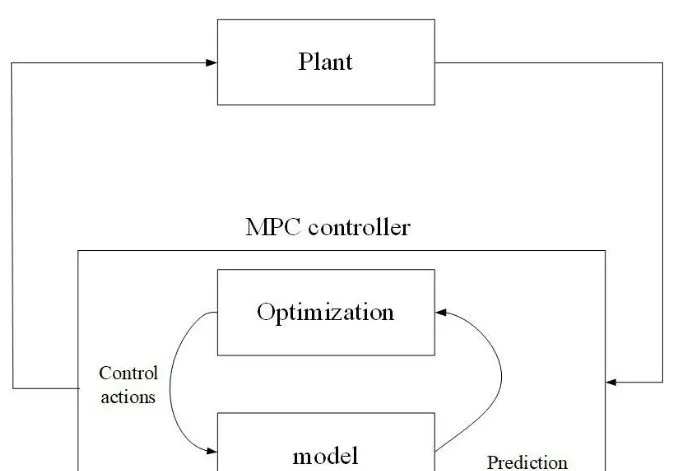
经典模型预测控制(Classic Model Predictive Control, MPC):经典 MPC 通过在预测时间范围内最小化目标函数来找到最优控制序列,适合已知系统模型的情况。在 CAE 仿真中,经典 MPC 可以利用历史仿真数据构建系统模型,预测新设计在不同条件下的响应。在实时监控中,MPC 可以根据当前边界和负载条件进行动态调整,以保持仿真结果的最优状态。
强化学习结合 MPC(RL-MPC):RL-MPC 结合强化学习和 MPC,通过强化学习优化 MPC策略,适合动态环境中的多目标优化。RL-MPC 在 CAE 仿真中可以利用历史数据增强MPC 的决策能力,在实时监控和动态调整边界条件时更加高效。适合复杂的多目标优化任务,通过强化学习不断更新 MPC 策略以适应不同仿真条件。

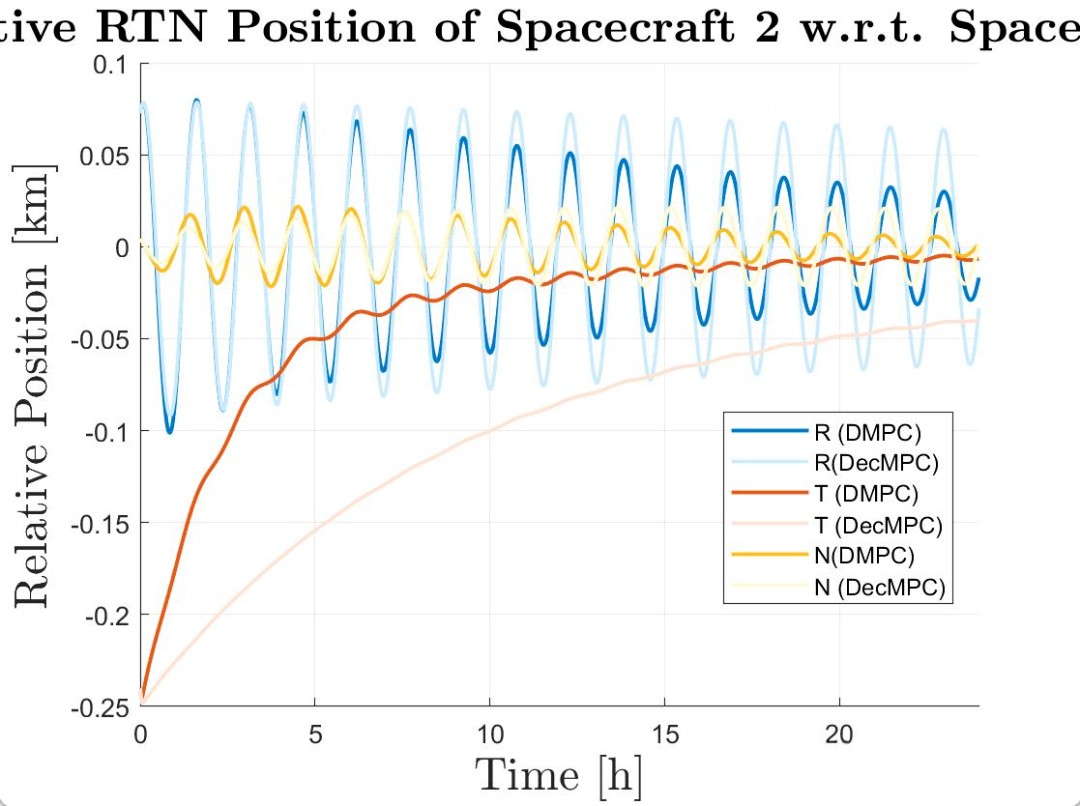
分布式 MPC(Distributed MPC, DMPC):DMPC 将系统划分为多个子系统,每个子系统独立应用 MPC 控制,适合分布式计算环境。在 CAE 仿真中,DMPC 适合大型仿真系统或多物理场仿真,通过对各个区域或子系统独立优化,协调不同区域的边界和负载条件。在多区域并行仿真中,DMPC 可以实现高效的实时反馈和局部动态优化。
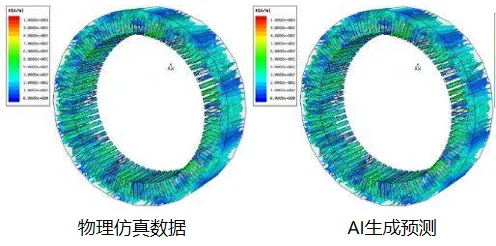
学习模型预测控制(Learning-Based MPC, L-MPC):L-MPC 使用深度学习或其他机器学习方法构建预测模型,适合非线性复杂系统。在 CAE 仿真中,L-MPC 可以利用历史数据通过神经网络构建预测模型,进行仿真结果预测。L-MPC 可以在实时监控中对边界条件和负载进行动态调整,适用于需要快速响应的非线性仿真场景。
经济模型预测控制(Economic MPC, EMPC):EMPC 将经济指标纳入优化目标,如节省材料或能源消耗,适合有成本优化需求的任务。在 CAE 仿真任务中,EMPC 可以优化边界条件和负载条件,以实现材料或能量的轻量化和高效利用。结合历史仿真数据,EMPC能在满足仿真精度的同时最大化经济效益,适用于多目标优化和动态反馈任务。
非参数模型预测控制(Non-Parametric MPC, NP-MPC):NP-MPC 使用非参数方法(如高斯过程、核方法)建模系统,适合未知或复杂模型。在 CAE 仿真中,NP-MPC 可以根据历史数据建立系统的非参数模型,用于动态预测仿真结果并调整边界条件。适合复杂、动态变化的仿真任务,在实时监控和动态优化时具有较高的适应性。
概率模型预测控制(Probabilistic MPC, P-MPC):P-MPC 通过概率模型预测未来状态的不确定性,适合高不确定性环境。在 CAE 仿真中,P-MPC 适用于具有随机负载或动态边界条件的环境。通过预测结果的不确定性,P-MPC 可以在实时监控中动态调整仿真条件,使仿真结果具有更高的可靠性和稳定性。
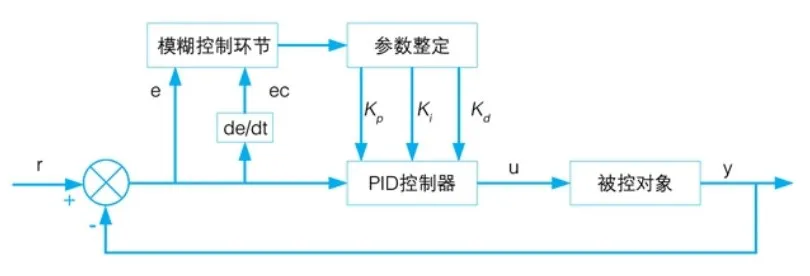
基于模糊控制的 MPC(Fuzzy MPC, F-MPC):F-MPC 将模糊控制与 MPC 相结合,以处理不确定性和复杂系统的非线性特性。F-MPC 适合在复杂非线性 CAE 仿真中使用,通过模糊逻辑控制边界条件和负载条件,实现实时调整。在不确定条件下,F-MPC 可以在仿真任务中提供稳定的控制反馈。
强化学习预测控制(Reinforcement Learning MPC, RL-MPC):RL-MPC 结合深度强化学习来改进 MPC 的控制策略,使其在动态和复杂环境中表现更优。在 CAE 仿真中,RL-MPC通过结合强化学习策略,适应不断变化的负载和边界条件。通过实时监控和历史数据的支持,RL-MPC 能够实现在线学习和动态调整,是高效实时反馈与动态优化的理想选择。
注:本文图片来源于网络,如有侵权请联系删除

